//---------------
Programa
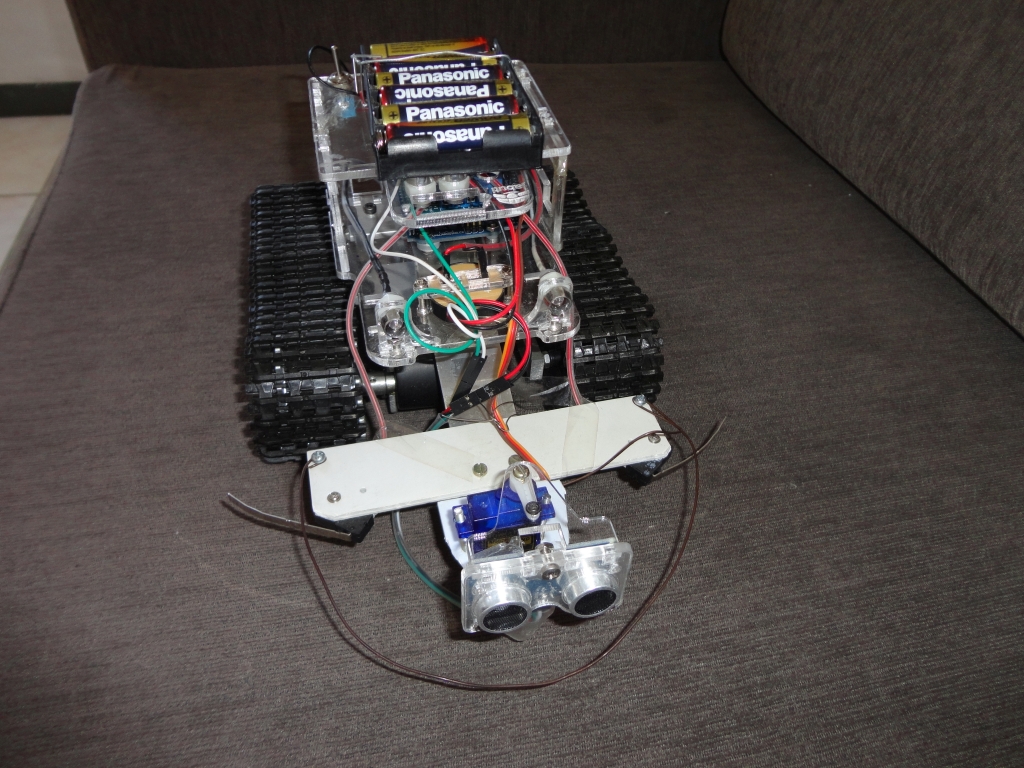
JABUTINO ATUALIZADO – EU- 20140519
20:40 -----------
#include
<Servo.h>
#include
<AFMotor.h>
//Instancia
o objeto referente aos motores DC
AF_DCMotor
motorEsquerdo(1); //Motor esquerdo na conexão "M1"
AF_DCMotor motorDireito(2);
//Motor direito na conexão "M2"
//Definições de velocidade em PWM de 0 a 255
const char
VEL_MAX = 255;
const char
VEL_MIN = 0;
const char
VEL_MED = 200;
//Pinos para controle do Ultrassom HC-SR04
//usar as
portas analógicas A0 e A1 como digitais
const int pinoTrigger = 14; // A0 = 14
const int pinoEcho = 15; // A1 = 15
//Servo
Motor
Servo meuServo;
const int
pinoSinalServo = 10; //o pino 10 é o pino de sinal da conexão
"SERVO_2"
//Define as
posições de calibragem do servo
//Valores
para conseguir um melhor alinhamento do servo, cada motor responde de forma
diferente.
//Os valores
devem variar de 0 a 180 graus, ajuste de acordo com seu motor na tentativa e
erro.
const int OLHA_ESQ
= 180;
const int OLHA_DIR
= 0;
const int OLHA_FRT
= 90;
//Método
obrigatório
//Realiza as
definições dos pinos e faz a inicialização da biblioteca de servo.
void setup(void)
{
//
Inicializa os motores com velocidade máxima
motorEsquerdo.setSpeed(VEL_MAX);
motorDireito.setSpeed(VEL_MAX);
//atribui os pinos do ultrassom
pinMode(pinoTrigger, OUTPUT);
pinMode(pinoEcho, INPUT);
//inicia
o Servo
meuServo.attach(pinoSinalServo);
//Coloca o servo virado para posicao frontal
meuServo.write(OLHA_FRT);
}
//Corpo
principal do programa, repete infinitamente
void loop(void)
{
//
Inicia andando para frente
// andarpFrente(VEL_MAX);
//Enquanto
não encontrar um obstáculo a menos de 10 centímetros
// while(calcularDistancia() > 10)
// {
// Inicia andando para frente
//andarpFrente(VEL_MAX);
//int lerChaveE = LOW; // Garante que a chave Esq estará em LOW.
//int lerChaveD = LOW; // Garante que a chave Dir estará em LOW.
//andarpFrente(VEL_MAX);
//int lerChaveE = LOW; // Garante que a chave Esq estará em LOW.
//int lerChaveD = LOW; // Garante que a chave Dir estará em LOW.
//Enquanto não encontrar um obstáculo a menos de
10cm
while(medeDistancia() > 10)
{
andarpFrente(VEL_MAX);
// Lê a Chave Esquerda:
//int lerChaveE = digitalRead(ChaveE);
//int lerChaveD = digitalRead(ChaveD);
//if (lerChaveE == HIGH)
if (digitalRead(ChaveE) == HIGH)
{
Serial.println("Esquerda");
tone(pinoBuzzer, 840); //envia um sinal de 740Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpDireita(VEL_MED);
delay(500); //aguarda 0,5 segundo
}
else // Lê chave Direita:
//if (lerChaveD == HIGH)
if (digitalRead(ChaveD) == HIGH)
{
Serial.println("Direita");
tone(pinoBuzzer, 840); //envia um sinal de 840Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpEsquerda(VEL_MED);
delay(500); //aguarda 0,5 segundo
}
delay(100); //Faz uma leitura da distancia a cada 0,1 segundo
}
while(medeDistancia() > 10)
{
andarpFrente(VEL_MAX);
// Lê a Chave Esquerda:
//int lerChaveE = digitalRead(ChaveE);
//int lerChaveD = digitalRead(ChaveD);
//if (lerChaveE == HIGH)
if (digitalRead(ChaveE) == HIGH)
{
Serial.println("Esquerda");
tone(pinoBuzzer, 840); //envia um sinal de 740Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpDireita(VEL_MED);
delay(500); //aguarda 0,5 segundo
}
else // Lê chave Direita:
//if (lerChaveD == HIGH)
if (digitalRead(ChaveD) == HIGH)
{
Serial.println("Direita");
tone(pinoBuzzer, 840); //envia um sinal de 840Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpEsquerda(VEL_MED);
delay(500); //aguarda 0,5 segundo
}
delay(100); //Faz uma leitura da distancia a cada 0,1 segundo
}
//Se encontrou um obstáculo recua por 1 segundo e
pára ... (continua)
andarpTras(VEL_MED);
delay(1000);
pararMotores();
//Verifica qual lado tem maior distância
até um obstáculo
int esquerda = 0, direita = 0;
meuServo.write(OLHA_ESQ); //vira o servo
para a esquerda
delay(500); //aguarda o servo
completar o movimento
esquerda = calcularDistancia(); //mede a
distancia na esquerda
meuServo.write(OLHA_DIR); //vira o servo para
a direita
delay(500); //aguarda o servo
completar o movimento
direita = calcularDistancia(); //mede a
distancia na direita
meuServo.write(OLHA_FRT); //olha pra
frente novamente
delay(500); //aguarda o servo completar
o movimento
if(esquerda > direita)
{ //se a distancia do obstáculo na esquerda for maior que na direita
//vira para esquerda
girarpEsquerda(VEL_MAX);
}
else
{ // se a distancia do obstaculo na
direita for maior ou igual que na esquerda
//vira para a direita
girarpDireita(VEL_MAX);
}
//Aguarda alguns instantes para o
robô virar
delay(500); //<< modifique esse
tempo se desejar que ele vire por mais ou menos tempo
}
//Utiliza o sensor de Ultrassom HC-SR04
para medir a distancia em centímetros
int calcularDistancia()
{
//Garante que o pino de Trigger está
LOW
digitalWrite(pinoTrigger, LOW);
delayMicroseconds(2);
//cria um pulso de 5 microssegundos
no Trigger
digitalWrite(pinoTrigger,
HIGH);
delayMicroseconds(5);
digitalWrite(pinoTrigger, LOW);
//aguarda o echo
long microssegundos = pulseIn(pinoEcho,
HIGH);
// A
velocidade do som é 340 m/s ou aproximadamente 29 microssegundos por
centimetro.
// O
pulso faz uma viagem de ida e volta do sensor até o obstáculo
//
assim, para calcular a distancia temos que dividir esse tempo pela metade
//
desta forma...
return int(microssegundos / 29 / 2
} // Fim do LOOP-void-
//Gira as duas rodas para frente
//Como os motores estão virados para lados
opostos eles devem
//girar em sentidos opostos para que as
rodas girem na mesma direção
void andarpFrente(char
velocidade)
{
motorEsquerdo.setSpeed(velocidade);
motorDireito.setSpeed(velocidade);
motorEsquerdo.run(FORWARD);
motorDireito.run(BACKWARD);
}
//Gira as duas rodas para trás
//Como os motores estão virados para lados
opostos eles devem
//girar em sentidos opostos para que as
rodas girem na mesma direção
void andarpTras(char velocidade)
{
motorEsquerdo.setSpeed(velocidade);
motorDireito.setSpeed(velocidade);
motorEsquerdo.run(BACKWARD);
motorDireito.run(FORWARD);
}
//Gira as duas rodas em sentido inverso,
girando no próprio eixo
void girarpEsquerda (char velocidade)
{
motorEsquerdo.setSpeed(velocidade);
motorDireito.setSpeed(velocidade);
motorEsquerdo.run(BACKWARD);
motorDireito.run(BACKWARD);
}
//Gira as duas rodas em sentido inverso,
girando no próprio eixo
void girarpDireita(char velocidade)
{
motorEsquerdo.setSpeed(velocidade);
motorDireito.setSpeed(velocidade);
motorEsquerdo.run(FORWARD);
motorDireito.run(FORWARD);
}
//Pára os
motores definindo os dois pinos Enable em estado Low
void pararMotores()
{
motorEsquerdo.run(RELEASE);
motorDireito.run(RELEASE);
}
//
=================================================================
/* Preciso
entrar com a parte das chaves / colisão, para evitar que o robô se agarre nas
laterais, como já ocorreu aqui.
Com base na rotina de teste para um só
sensor, tentei criar uma rotina para os DOIS sensores, um de cada lado, à
frente:*/
{ // Inicio rotina das CHAVES:
// Faz a leitura dos sensores de CHAVES
= colisão:
int lerChaveE =
digitalRead(pinoChaveE);
int
lerChaveD = digitalRead(pinoChaveD);
// Verifica se a leitura é diferente da
leitura anterior
// para DESVIAR apenas quando mudar
// if (lerChaveE != lidoAntE)
{
//imprime o valor chave Esq:
if (lerChaveE ==
HIGH)
{ Serial.println("Esquerda");
tone(pinoBuzzer, 740); //envia um sinal
de 740Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpDireita(VEL_MED);
delay(500); //aguarda 1 segundo
}
else
// if (lerChaveD !=
lidoAntD)
{
// imprime o valor da chave Direita:
if (lerChaveD ==
HIGH)
{ Serial.println("Direita");
tone(pinoBuzzer, 840); //envia um sinal
de 840Hz para o pino 9
delay(100); //aguarda 0,1 segundo
noTone(pinoBuzzer); //interrompe o som no pino 9
girarpEsquerda(VEL_MED);
delay(500); //aguarda 0,5 segundo
}
}
// armazena o valor
lido para monitorar as próximas mudanças:
// lidoAntE = lerChaveE;
// lidoAntD = lerChaveD;
// aguarda minimamente para eliminar
ruidos:
delay(5);
} // final da rotina das CHAVES
==> questionamento no blog do Clube Hardware
//
inicialmente coloquei-a no inicio, logo após o robô começar a andar pra
frente... mas não funcionou!
// Fiz o teste das chaves, funcionou, com as
duas, normal (depois de muito pelejar).
// Daí para
frente nada das coisas funcionarem. Na primeira vez/ versão o robô funcionou,
mas sem funcionar as chaves.
// PERGUNTO:
1) Como concatenar as duas rotinas? è preciso ainda adicionar o LDR e os LED
brancos / faróis.
2) Onde fica a chave
que fecha o void loop() ?